Data & Policy
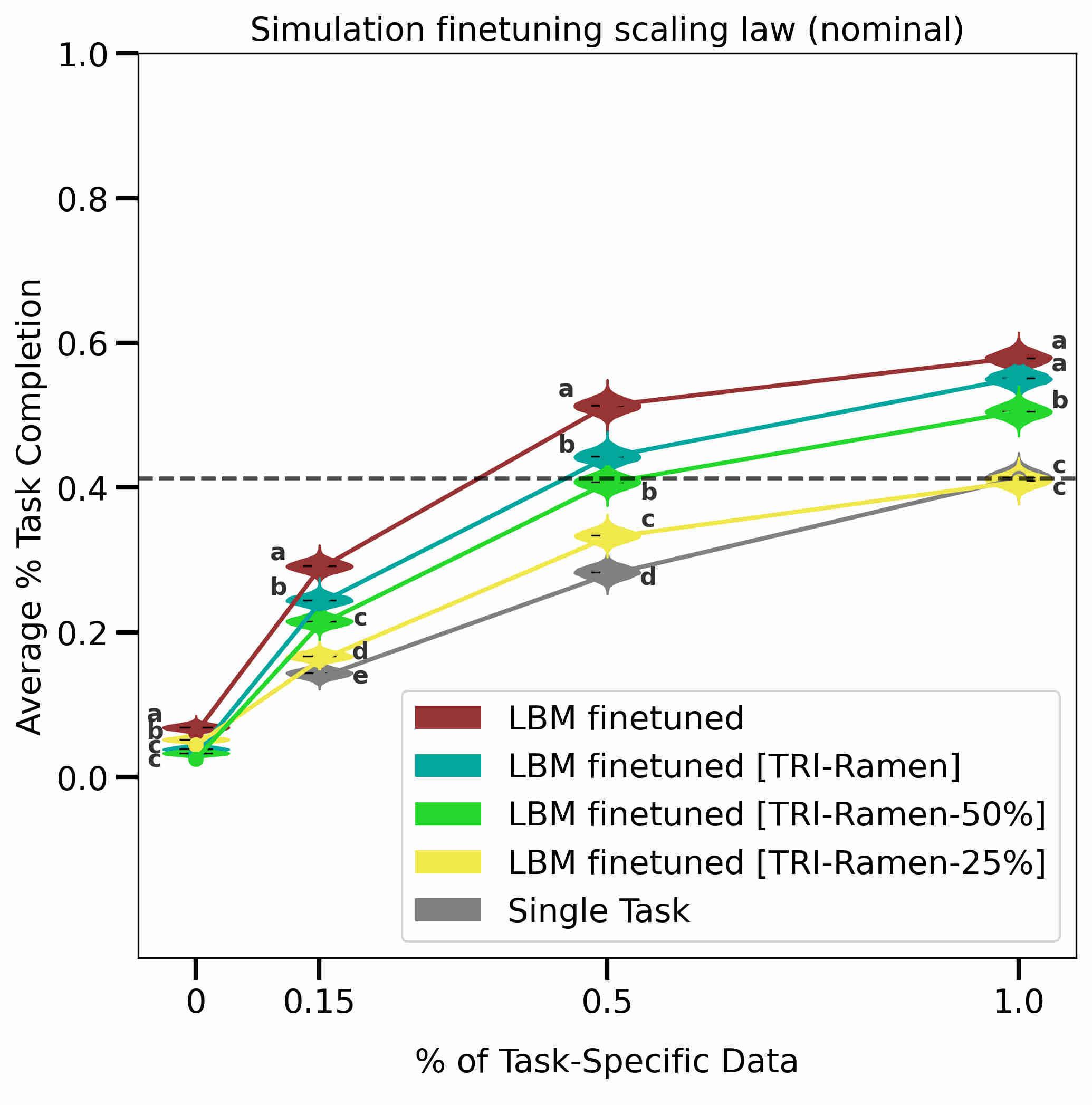
We create AI foundation models to power general-purpose robots by developing Large Behavior Model (LBM) policies that directly command robot motions. Crucial to this effort is also building a rigorous understanding of data quality, diversity, and modality tradeoffs at multiple parts of the model-creation pipeline.
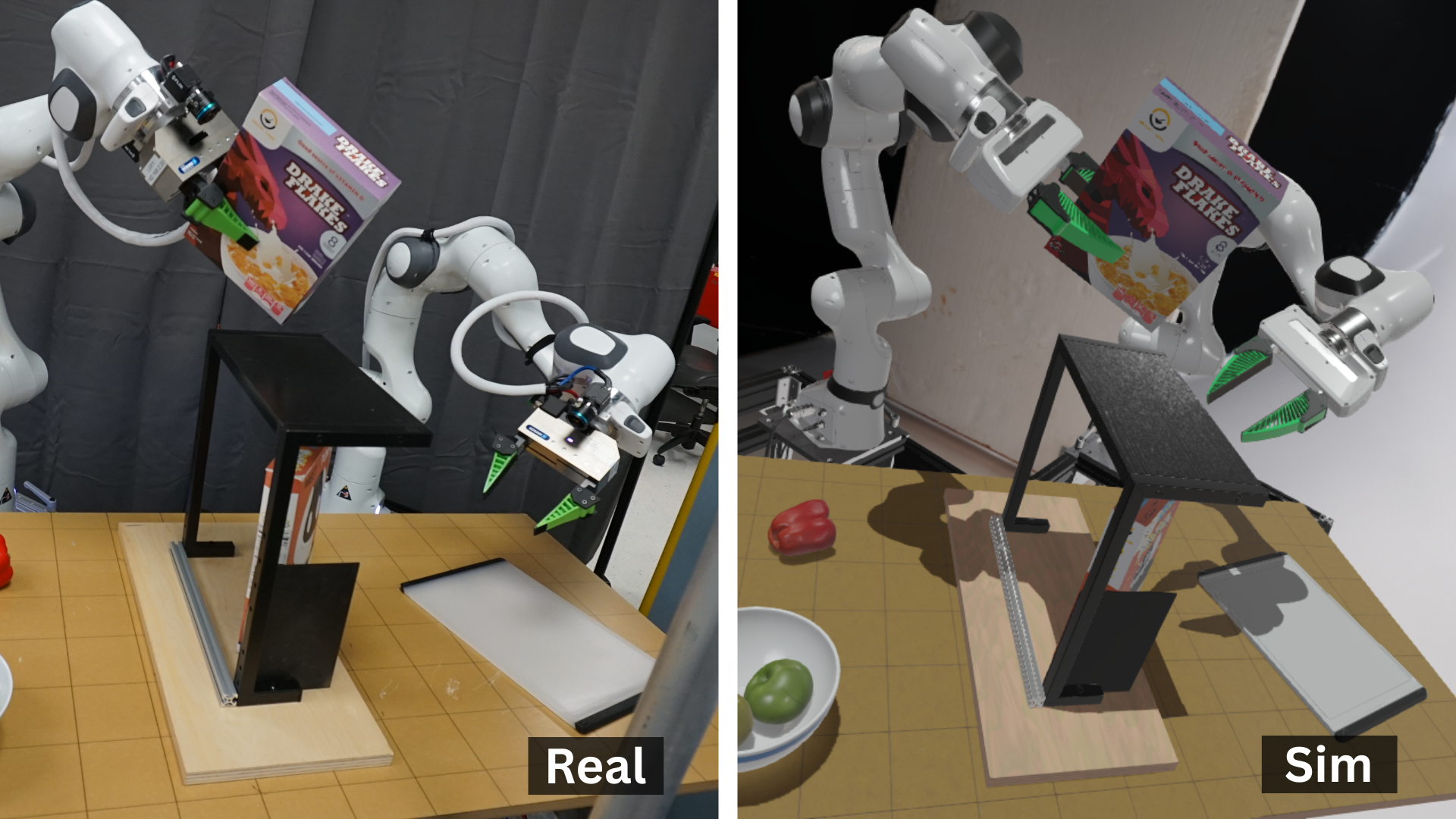
Platform & Simulation
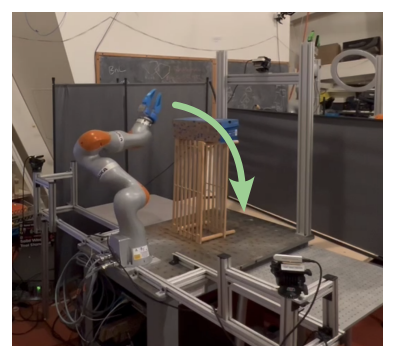
Capable robots are critical to unlocking the potential of LBMs. We maintain both physical and simulated versions of our robot fleet, allowing us to iterate and experiment at scale, amplifying the amount of robot data we generate and our ability to develop improved LBMs.
Robot Learning via Video Prediction
We are building LBMs that learn from large, diverse data sources. Learning from video is key to our approach because video features concepts important to the physical world such as cause-and-effect and physics, allowing us to scale data exponentially beyond what is possible via human demonstrations.
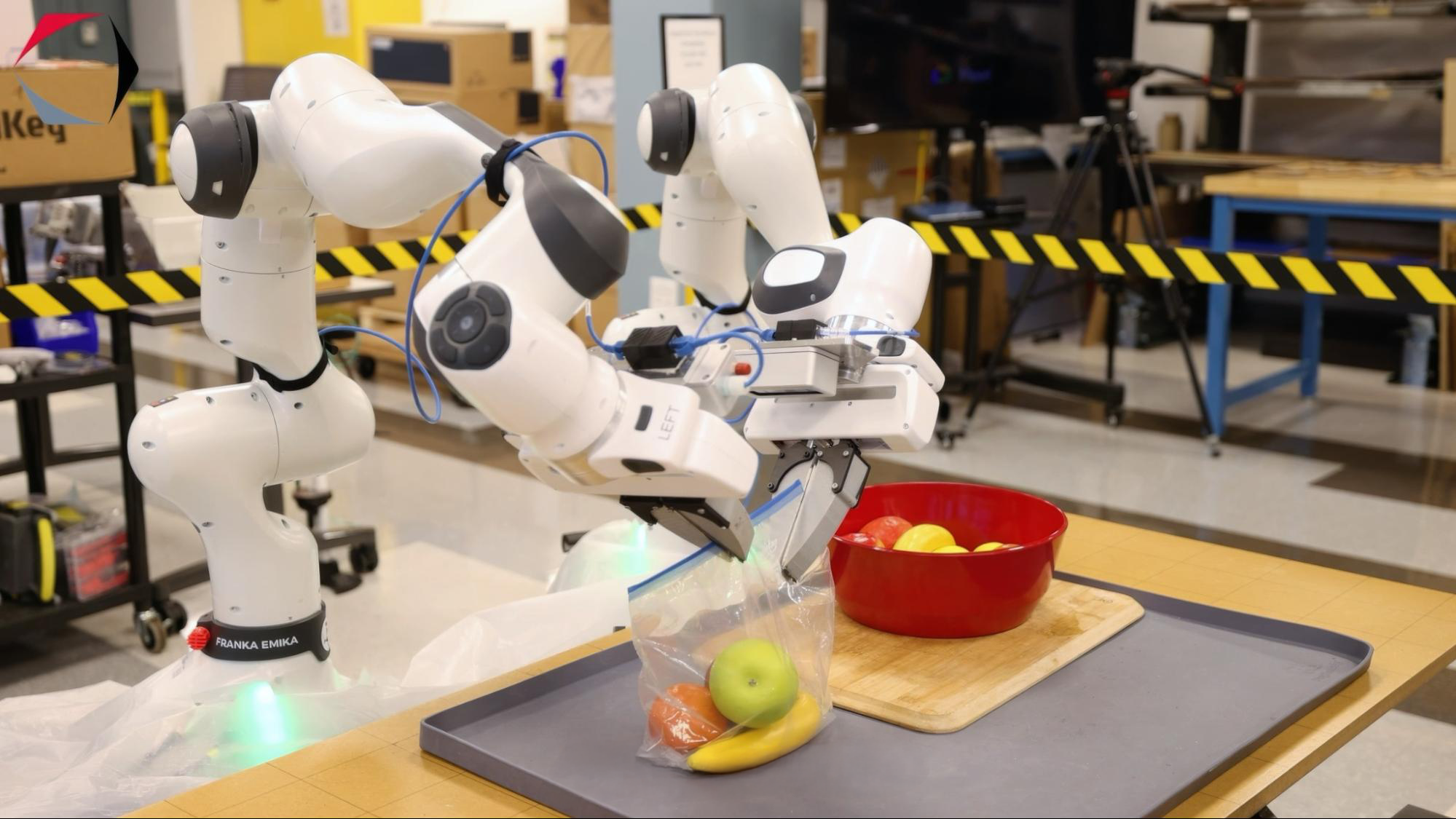
Placing gears precisely, recovering from a mistake, and coordinating with tools
Coring, slicing, and resetting tools
Setting the table, pouring cereal, and placing objects onto tableware
See our research results with LBM 1.0.
Drake is a C++ toolbox for analyzing the dynamics of our robots and building control systems for them.
Click the image below for more information.
Punyo is a design for a soft bubble gripper that allows for robust and perceptive manipulation.
Click the image below for more information.