TRI Authors: Guy Rosman
All Authors: F. Naser, I. Gilitschenski, G. Rosman, A. Amini, F. Durand, A. Torralba, G. W. Wornell, W. T. Freeman, S. Karaman, and D. Rus
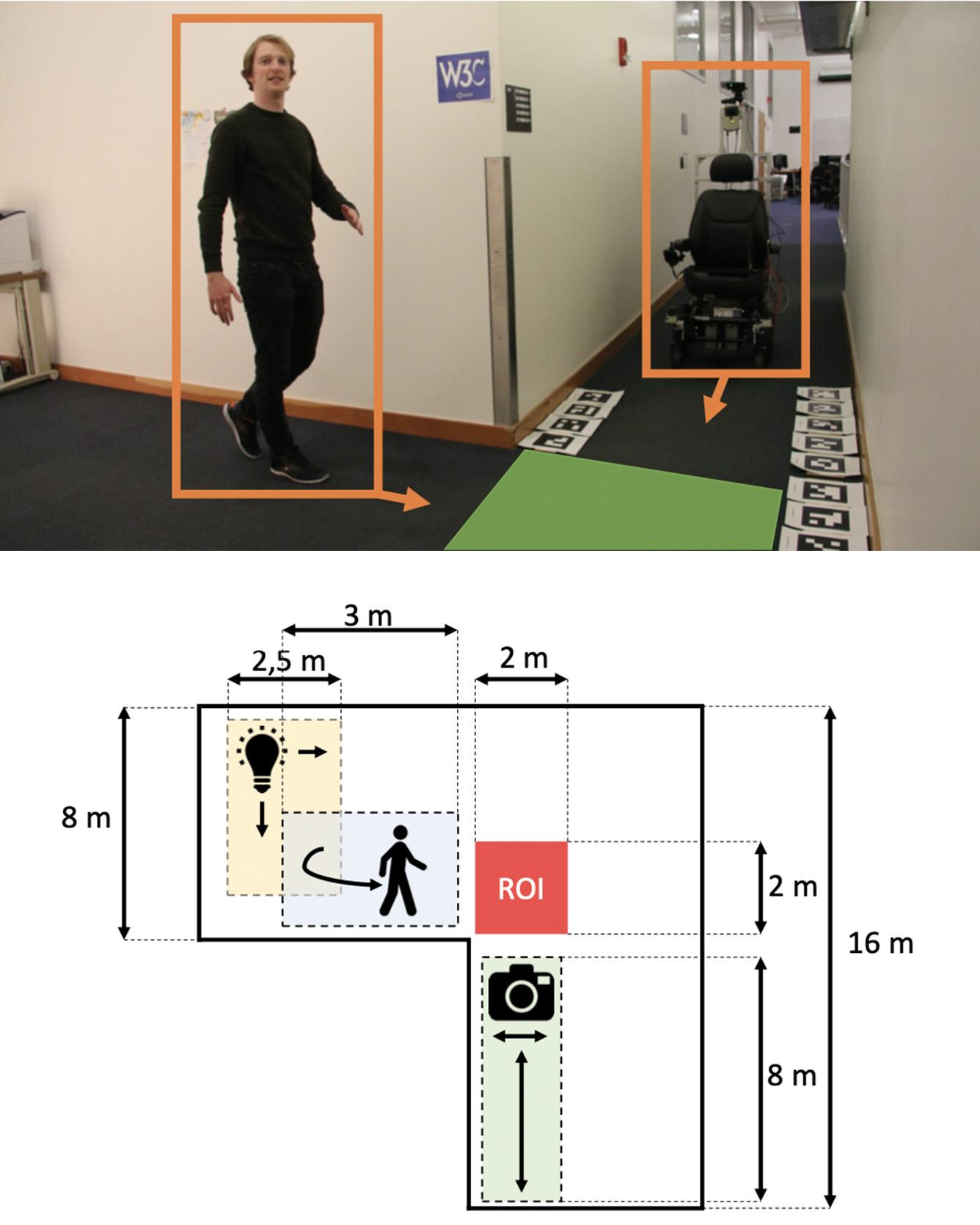
Moving obstacles occluded by corners are a potential source for collisions in mobile robotics applications such as autonomous vehicles. In this paper, we address the problem of anticipating such collisions by proposing a vision-based detection algorithm for obstacles which are outside of a vehicle's direct line of sight. Our method detects shadows of obstacles hidden around corners and automatically classifies these unseen obstacles as “dynamic” or “static”. We evaluate our proposed detection algorithm on real-world corners and a large variety of simulated environments to assess generalizability in different challenging surface and lighting conditions. The mean classification accuracy on simulated data is around 80% and on real-world corners approximately 70%. Additionally, we integrate our detection system on a full-scale autonomous wheelchair and demonstrate its feasibility as an additional safety mechanism through real-world experiments. We release our real-time-capable implementation of the proposed ShadowCam algorithm and the dataset containing simulated and real-world data under an open-source license. Read more
Citation: Naser, Felix, Igor Gilitschenski, Guy Rosman, Alexander Amini, Fredo Durand, Antonio Torralba, Gregory W. Wornell, William T. Freeman, Sertac Karaman, and Daniela Rus. "Shadowcam: Real-time detection of moving obstacles behind A corner for autonomous vehicles." In 2018 21st International Conference on Intelligent Transportation Systems (ITSC), pp. 560-567. IEEE, 2018.