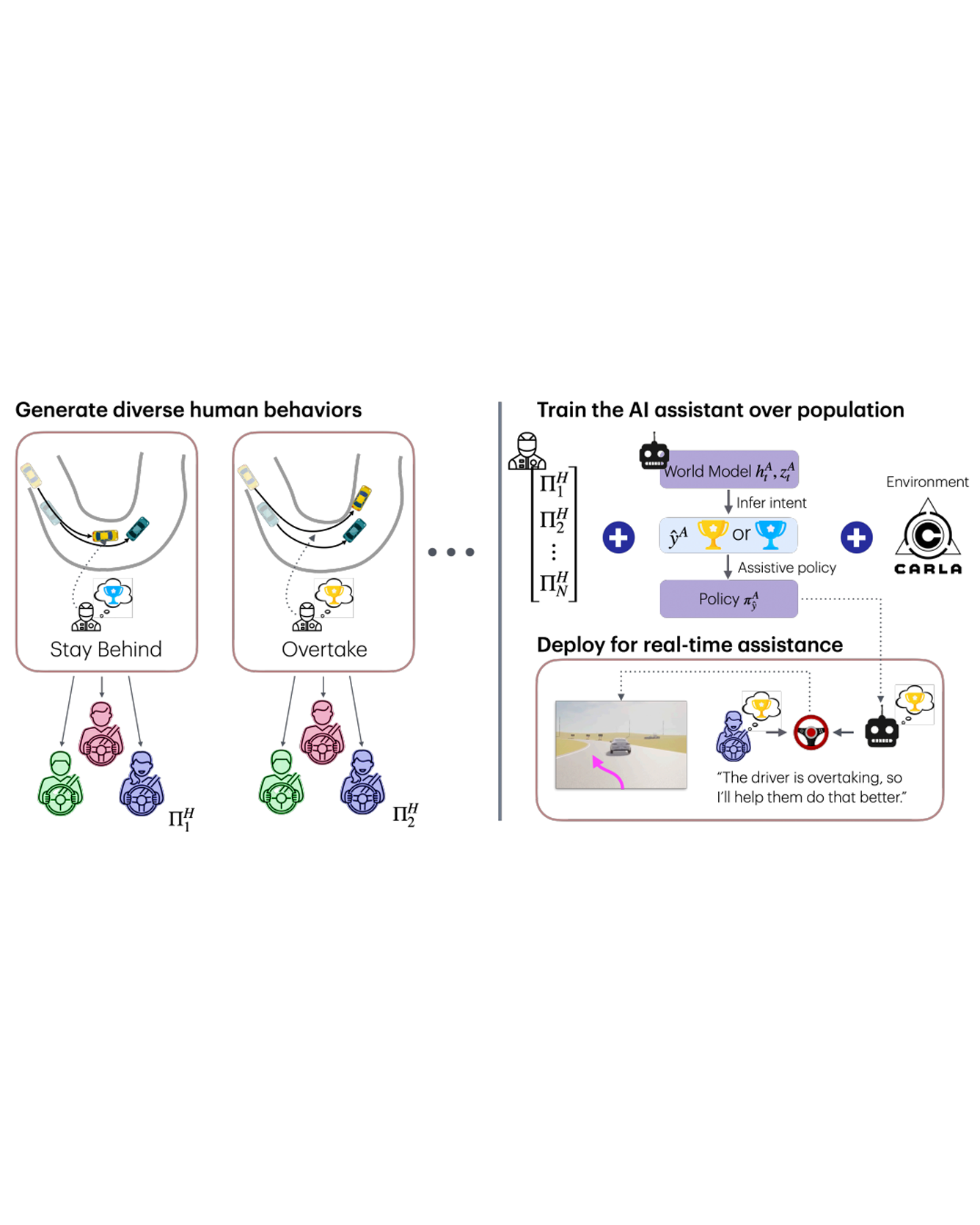
Tight coordination is required for effective human-robot teams in domains involving fast dynamics and tactical decisions, such as multi-car racing. In such settings, robot teammates must react to cues of a human teammate's tactical objective to assist in a way that is consistent with the objective (e.g., navigating left or right around an obstacle). To address this challenge, we present Dream2Assist, a framework that combines a rich world model able to infer human objectives and value functions, and an assistive agent that provides appropriate expert assistance to a given human teammate. Our approach builds on a recurrent state space model to explicitly infer human intents, enabling the assistive agent to select actions that align with the human and enabling a fluid teaming interaction. We demonstrate our approach in a high-speed racing domain with a population of synthetic human drivers pursuing mutually exclusive objectives, such as "stay-behind" and "overtake". We show that the combined human-robot team, when blending its actions with those of the human, outperforms the synthetic humans alone as well as several baseline assistance strategies, and that intent-conditioning enables adherence to human preferences during task execution, leading to improved performance while satisfying the human's objective. READ MORE


